
Unmanned Underwater Vehicles (UUVs) are referred to as underwater drones due to their ability to function as a vehicle without any human occupants. These vehicles can also be remotely or autonomously operated, which means they could be controlled by humans to function as desired or operate independently of human commands. Remotely operated vehicles (ROVs) are robots controlled by humans, at a distance, for underwater deployment. ROVs are often used in offshore organizations for inspection, repair, and installations due to their benefits in the replacement of human divers (safety, depth, endurance & cost). ROVs function using an acoustic link or tethered cable, receiving commands from an operator onboard. Autonomous underwater vehicles (AUVs), on the other hand, are not constrained to cables and constant human supervision; Hence, AUVs are used for more advanced tasks like long-range data collection or hydrothermal inspection.
What did the first Submarine look like?
The First conceptual Submarine design was known to have been made by the British mathematician William Bourne, around 1578. Bourne’s idea led to the world’s first working prototype in the 17th century, which was built by the Dutch inventor and polymath, Cornelius Drebbel. Drebble’s prototype was described as a revamped rowboat, coated in grease controlled by a team of oarsmen.
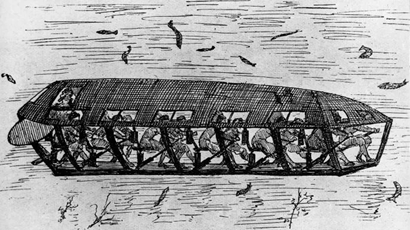
Drebble’s Submarine Illustration
In 1620, Drebbel utilized his submarine in a demonstration to King James and his fellow residents of London, diving about 15 feet beneath the Isis River in Southern England.
The Journey of UUVs:
In 1866, the first modernized UUV was fabricated in the image of a self-propelled torpedo. Robert Whitehead was known to be the first inventor of an automobile torpedo, which was propelled by a two-cylinder compressed-air engine. In 1868, Whitehead’s torpedo was later refined to be an 11-foot, 8-inch model with explosives over 40 pounds (usually inbuilt into the head) with a 200-yard range.
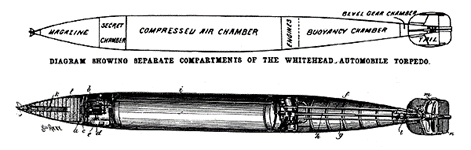
The Whitehead Torpedo, U.S Naval Undersea Museum
In 1869, Whitehead’s torpedo fueled the mission of an American torpedo, due to the attention it got from David Porter (assistant secretary of the Navy). Between 1870 and 1880, several failed torpedoes had been designed at the United States (U.S) Torpedo station in Newport, Rhode Island; However, a leader of the department of astronomy and navigation at the U.S. Naval Academy, John Howell, decided to design torpedoes in his spare time in 1870. Howell’s design utilized a flywheel inside the torpedo, providing stability and propulsion for the torpedo whiles submersed. In 1871, Howell patented his design and in 1881 he refined it to be presented as a working model to the world. Unfortunately, after Howell torpedoes entered service in 1895, it was short-lived, due to the prohibition of their launch from steam turbine-powered tubes.
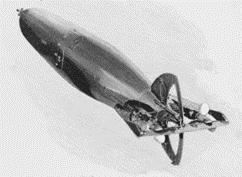
The Howell Torpedo, U.S Naval Undersea Museum
During the 1950s, the U.S created the first AUV to explore the arctic waters. This research led to the development of the special purpose underwater research vehicle (SPURV). In 1957, the University of Washington’s Applied Physics Laboratory developed the SPURV, whiles funded by the Office of Naval Research (ONR). The SPURV was known to dive up to 10,000 feet and last up to four hours, it was also known for its sensors being capable of temperature and conductivity measurements. The SPURVs were used in supporting oceanographic research (acoustic transmission, diffusion studies & submarine wakes). A SPURV II (a refined version of the SPURV) was later created around 1979 after five of the SPURVs were used for service in the U.S Navy.

The University of Washington SPURV
In 1980, emphasis was given to ROVs, leading to the creation of the autonomous and remote-controlled submarine (ARCS). ARCS was created by the International Submarine Engineering company, its development led to most UUVs’ current ability to test platforms with longer battery life, and better navigational and communicational systems. In 1995, the advancement in battery life allowed for the idea of gliders to be infused into UUV’S. These gliders made it possible for long-term dives and an extended period of submergence. Going to the early 2000s, the number of users for UUV grew exponentially and the funding increased for its technological development. The user growth for UUVs expanded globally leading to their current use beyond government agencies.
Modern UUVs now take on different forms, completing more complex tasks such as Ship hull inspection, mine hunting, intelligence gathering and exploration. AUVs are now mostly used in the oil and gas industry for surveillance and scientific research, they are also used in naval defense applications like mine detection and payload delivery. Military AUVs, on the other hand, network with unmanned aerial vehicles (drones used for tactical planning and observation) to provide a cross-domain intelligence, surveillance and reconnaissance (ISR) solution for missions. Modern AUVs are powered by rechargeable batteries, fuel cells or solar power and utilize an advanced navigation system due to radio restriction. The Marine Inertial Navigation System (INS) is used to attain the velocity approximation, acceleration and position of the AUV. For propulsion, AUVs utilize electrical thrusters and propellers; however, current underwater gliders (recognized as AUV subsets) manage their depth using variable buoyancy and move forward by converting hydrofoils.

Slocum G3 Underwater Glider (Teledyne Marine)
Modern ROVs function in rougher water with a Tether Management System (TSM), which controls the tether’s length to reduce drag effects underwater. Modern ROVs come in different classes (size, weight and function) such as Inspection-Class Vehicles (ICV), Work-Class Vehicles (WCV), and Mini-Class Vehicles (MCV). The MVCs are portable and are used for sensing tasks and pure underwater inspection. The WCVs are the largest and most powerful underwater ROVs due to their ability to manage heavy-duty cables and manipulators. These vehicles use hydraulic pumps, allowing them to dive thousands of feet below water. The ICVs are smaller than the working class and they are usually fitted with cameras/sensors and used in near-shore environments.

BlueROV2
The Navy is known for its frequent use of UUVs in both the uniformed and civilian fields; Hence they’re constantly looking forward to UUV advancements. The Navy suggests rapid learning effort as a key factor in UUV development as they look into transitioning to the SSN(X) next-generation attack submarine. The SSN(X) is a nuclear-powered attack submarine first discussed by the U.S Navy in 2014, with a budget of over $98 million in research and development. Unlike the Virginia and Seawolf Class attack submarines (predecessors), which were designed for dominance in the littoral, the SSN(X) is designed for greater transit speed in stealth conditions. The SSN(X) is also fabricated for sustenance in combat when facing a great number of threats.
As a means of furthering the development of UUVs, the Department of Navy (DON) offers a federal grant, which is a form of federal financial assistance for ideas and projects. Federal funding is not only built to provide public service but to stimulate the economy and benefit the public. These grants are given to High Schools and Colleges/Universities STEM Students to advance their knowledge of STEM Principles. The Naval Underwater STEM (NUSTEM) team work to build key knowledge on the engineering behind UUVs, human-machine technology interface, and underwater communications. These key knowledge areas are in line with the Navy’s Framework Priorities of the Augmented Warfighter and Sensing & Sense Making. A curriculum lesson is made by the NUSTEM team to emphasize Human-robot Interaction, Undersea Communications, Submarines, UUVs, Bio-robotics, Sea, Air and Space communications and logistics. These proposed lessons will in turn quicken the Navy’s goal for a highly skilled and diverse STEM workforce.
References:
“The Development of Autonomous Underwater Vehicles (AUV); A Brief Summary”. Wpressutexas.Net, 2022, http://wpressutexas.net/cs378h/images/d/de/ICRA_01paper.pdf.
Nopr.Niscpr.Res.In, 2022, http://nopr.niscpr.res.in/bitstream/123456789/6204/1/IJMS%2038%283%29%20282-295.pdf.
“The Remarkable Story of a Howell Torpedo – U. S. Naval Undersea Museum”. U. S. Naval Undersea Museum, 2022, https://navalunderseamuseum.org/howell/.
“Special Purpose Underwater Research Vehicle (SPURV)”. Navaldrones.Com, 2022, http://www.navaldrones.com/SPURV.html#:~:text=The%20Special%20Purpose%20Underwater%20Research,of%20Naval%20Research%20(ONR).
“9 Groundbreaking Early Submarines”. HISTORY, 2022, https://www.history.com/news/9-groundbreaking-early-submarines.
Rees, Caroline. “Autonomous Underwater Vehicles | AUV Technology | Underwater Gliders”. Unmanned Systems Technology, 2022, https://www.unmannedsystemstechnology.com/expo/autonomous-underwater-vehicles-auv/.
Dictionary.Com, 2022, https://www.dictionary.com/.
Keywords:
[1] Autonomous: (of a machine) able to operate with little or no human control or intervention.
[2] Acoustic: (of a building material) designed for controlling sound, usually used as communication links for UUVs.
[3] Bio-robotics: integration of human-like senses in robot
[4] Conductivity: the property or power of conducting heat, electricity, or sound.
[5] Diffuse: to pour out and spread, as a fluid.
[6] Domain: a realm or range of personal knowledge, responsibility, etc.
[7] Exponential: rising or expanding at a steady, rapid rate
[8] Fabricate: to make by assembling parts or sections.
[9] Flywheel: a heavy disk or wheel rotating on a shaft so that its momentum gives almost uniform rotational speed to the shaft and to all connected machinery.
[10] Gliders: external fins perpendicular to the frame of the UUV which allow for a linear movement of deeper, controlled dives.
[11] Hull: any covering or envelope.
[12] Hydraulic: operated by the pressure created by forcing the water, oil, or another liquid through a comparatively narrow pipe or orifice.
[13] Hydrofoil: a surface form creating a thrust against water in a direction perpendicular to the plane approximated by the surface.
[14] Hydrothermal: noting or pertaining to the action of hot, aqueous solutions or gases within or on the surface of the earth.
[15] Infuse: to introduce, as if by pouring; cause to penetrate.
[16] Littoral: relating to the shore of a lake, sea, or ocean.
[17] Oarsman: a person who rows a boat, especially a racing boat.
[18] Occupant: a person, family, group, or organization that lives in, occupies, or has quarters or space in or on something.
[19] Oceanography: the branch of physical geography dealing with the ocean.
[20] Offshore: at a distance from the shore, on a body of water:
[21] Polymath: a person of great learning in several fields of study.
[22] Propel: to drive, or cause to move, forward or onward.
[23] Reconnaissance: a general examination or survey of a region, usually followed by a detailed survey.
[24] Refine: to bring to a finer state or form by purifying.
[25] Revamp: an act or instance of restructuring, reordering or revising something.
[26] Submergence: to sink or plunge under water.
[27] Steam Turbine: a turbine driven by steam pressure.
[28] Tether: to use an electronic device to enable a wireless internet connection on another device.
[29] Torpedo: a self-propelled, cigar-shaped missile containing explosives and often equipped with a homing device, launched from a submarine or other warship, for destroying surface vessels or other submarines.
[30] Transmit: to send a signal by wire, radio, or television waves.
[31] Unmanned: without the physical presence of people in control
[32] Wake: the region of disturbed flow, downstream of a solid body moving through a fluid, caused by the flow of the fluid around the body.
